OpenWorm Modeling Approach¶
Mission¶
Our main goal is to build the world's first virtual organism — an in silico implementation of a living creature — for the purpose of achieving an understanding of the events and mechanisms of living cells.
This is now formalized in 29 Design Documents (DD001-DD028, plus DD014.1 and DD014.2) that specify every subsystem from ion channels to organism behavior, validated against experimental data.
From Prototype to Production (2011-2026)¶
The Early Vision (2011-2014): CyberElegans Prototype¶
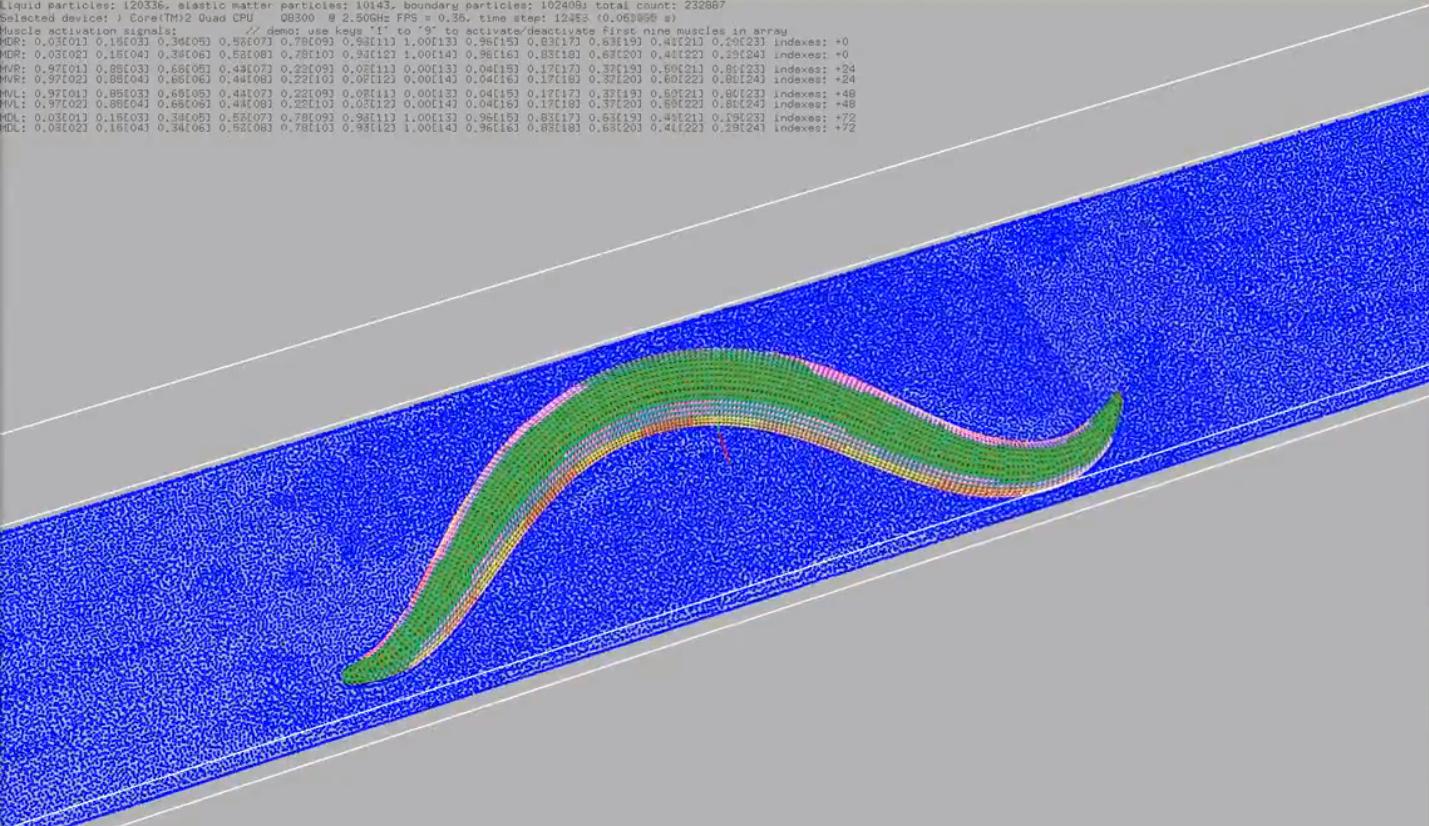
When OpenWorm started, we built a prototype (CyberElegans, 2014) demonstrating the core idea: simulate neurons, muscles, and body physics in a coupled loop to produce emergent locomotion.
Watch the CyberElegans prototype
This prototype proved the concept worked. But it was:
- Not validated against experimental data
- Hardcoded parameters (not tunable)
- 302 identical neurons (not biologically differentiated)
- No organ systems (pharynx, intestine, reproductive)
The Current Architecture (2018-2026): Design Document Era¶
Today, OpenWorm is built on formal Design Documents that specify:
- DD001: Neural Circuit — 302-neuron HH model, graded synapses, validated kinematics
- DD002: Muscle Model — Calcium-force coupling, Boyle & Cohen 2008 parameters
- DD003: Body Physics — Sibernetic SPH, ~100K particles, PCISPH pressure solver
These three DDs (the "core chain") are WORKING and VALIDATED:
- 15ms simulations produce emergent locomotion
- Validated against Schafer lab kinematics (speed, wavelength, frequency within +/-15%)
- Published: Sarma et al. 2018, Gleeson et al. 2018
The Multi-Scale Architecture¶
OpenWorm doesn't model at one scale — it models at five scales simultaneously, coupled together:
| Scale | Time | Space | Design Documents | Validation |
|---|---|---|---|---|
| Molecular | Microseconds | Angstroms | DD017 (foundation models to params) | Protein structures (AlphaFold) |
| Channel | Milliseconds | Nanometers | DD001 (HH channels), DD005 (CeNGEN to conductances) | Patch clamp electrophysiology |
| Cellular | Milliseconds-seconds | Micrometers | DD001 (neurons), DD002 (muscles), DD007-DD009 (organs) | Calcium imaging, EMG |
| Tissue | Seconds | Hundreds of um | DD003 (body physics), DD004 (cell identity) | Kinematics, organ function |
| Organism | Seconds-minutes | Millimeters | DD010 (behavioral validation), DD019 (closed-loop) | Behavioral assays |
This is what makes OpenWorm unique compared to other computational biology projects:
- Virtual Cell projects (CZI, Arc) focus on single-cell molecular scale
- Connectome projects focus on neural wiring
- OpenWorm is the only project coupling all 5 scales into a single whole-organism simulation
The Causal Loop (Bottom-Up + Validated)¶
Inspired by Robert Rosen's work on causal loops (referenced in DD001), OpenWorm focuses on the sensorimotor loop as the minimum core:
DD019 (Closed-Loop Touch Response) closes this loop — the worm can sense its environment (cuticle strain to MEC-4 channels to neural response to motor pattern to movement).
Components (Now Fully Specified)¶
Body and Environment¶
Historical (2014): CyberElegans prototype demonstrated SPH body physics
Current Specifications:
- DD003 (Body Physics): PCISPH algorithm, ~100K particles (liquid, elastic, boundary), validated
- DD004 (Mechanical Cell Identity): Per-particle cell IDs, 959 somatic cells, cell-type-specific elasticity
- DD022 (Environment): Substrates (agar, liquid, soil), chemical/thermal gradients, food particles
Implementation: Sibernetic repository
Neurons¶
Historical: 302-neuron NeuroML connectome (all neurons identical)
Current Specifications:
- DD001 (Neural Circuit): Multi-level HH framework (Levels A-D), graded synapses (Level C1 default)
- DD005 (Cell-Type Specialization): 128 distinct neuron classes from CeNGEN single-cell transcriptomics
- DD006 (Neuropeptides): 31,479 peptide-receptor interactions (Ripoll-Sanchez 2023), slow modulation
- DD007 (Pharynx): 20 pharyngeal neurons (semi-autonomous pumping circuit)
- DD018 (Egg-Laying): 2 HSN serotonergic + 6 VC cholinergic neurons (two-state pattern)
- DD019 (Touch): 6 touch receptor neurons (MEC-4 mechanotransduction)
- DD023 (Proprioception): B-class motor neuron stretch receptors
Implementation: c302 repository
Muscle Cells¶
Historical: Generic muscle model
Current Specifications:
- DD002 (Body Wall): 95 muscles, HH conductances 10-1000x smaller than neurons
- DD007 (Pharyngeal): 20 pharyngeal muscles, plateau potentials, gap-junction-synchronized
- DD018 (Reproductive): 16 sex muscles (8 vulval, 8 uterine), EGL-19/UNC-103 channels
Implementation: c302 repository + muscle_model repository
Organs (New!)¶
Added in Phase 3:
- DD007 (Pharynx): 63-cell semi-autonomous organ, 3-4 Hz pumping
- DD009 (Intestine): 20-cell IP3/Ca oscillator, 50s defecation motor program
- DD018 (Egg-Laying): 28-cell reproductive circuit
These weren't in the original vision but are now formalized with quantitative validation targets.
Validation (Now 3-Tier Framework)¶
Historical: "Movement validation project" (vague)
Current Specification: DD010: Validation Framework
| Tier | What | Validation Data | Blocking? |
|---|---|---|---|
| Tier 1 | Single-cell electrophysiology | Goodman lab patch clamp | No (warning) |
| Tier 2 | Circuit functional connectivity | Randi 2023 whole-brain imaging | YES (r > 0.5) |
| Tier 3 | Behavioral kinematics | Schafer lab WCON database | YES (+/-15%) |
Tool: open-worm-analysis-toolbox (being revived per DD021)
More details available on the Validation page.
Tuning and Optimization¶
Historical: "Use genetic algorithms to search parameter space"
Current Specification: DD017: Hybrid Mechanistic-ML Framework
4 components:
- Differentiable simulation backend — PyTorch ODE solver, gradient descent auto-fitting
- Neural surrogate for SPH — FNO learns muscle-to-movement mapping, 1000x speedup
- Foundation model to ODE parameters — ESM3/AlphaFold predict channel kinetics from gene sequences
- Learned sensory transduction — RNN learns stimulus-to-neuron response (chemotaxis, thermotaxis)
The mechanistic core (DD001-003 HH+SPH equations) is preserved. ML operates at boundaries (parameter fitting, acceleration, sensory front-end), never replacing causal interpretability.
Reproducibility (Platform Evolution)¶
Historical: Geppetto (2014-2020) — Java-based web platform for multi-algorithm simulation
Current Specification: DD014: Dynamic Visualization
- Phase 1: Trame viewer (PyVista + live server, organism + tissue scales)
- Phase 2: Interactive layers (neuropeptides, organs, validation overlay)
- Phase 3: Three.js + WebGPU static site, molecular scale, wormsim.openworm.org (WormSim 2.0)
Why the evolution from Geppetto? DD014 Alternatives Considered: Geppetto is Java-based, requires per-client server processes, not updated for WebGPU. Trame is lighter, Python-native (matches contributor skillset), actively maintained.
Geppetto is preserved as historical documentation and in the GitHub repository.
Integration (Now Formal Architecture)¶
Historical: "Multi-algorithm integration" concept (no formal spec)
Current Specification: DD013: Simulation Stack
- openworm.yml config system (single source of truth)
- Multi-stage Docker build (neural, body, validation, viewer stages)
- docker-compose.yml (quick-test, simulation, validate services)
- versions.lock (pin exact commits for reproducibility)
- Integration Maintainer role (coordinates coupling between DDs)
Each DD's Integration Contract specifies exactly what it consumes and produces, ensuring composability.
What's Next¶
The path from today's 302-neuron simulation to the complete 959-cell organism is organized into 4 implementation phases over ~18 months, progressing through cell-type specialization, sensory integration, organ systems, and finally the full organism with photorealistic visualization. See the Implementation Roadmap for the complete phase-by-phase timeline with milestones and Design Document assignments.
Contribute: Check the Design Documents for areas that match your skills, then follow the DD contribution workflow.